تصميم وبناء انسان آلي جوال لتتبع خط
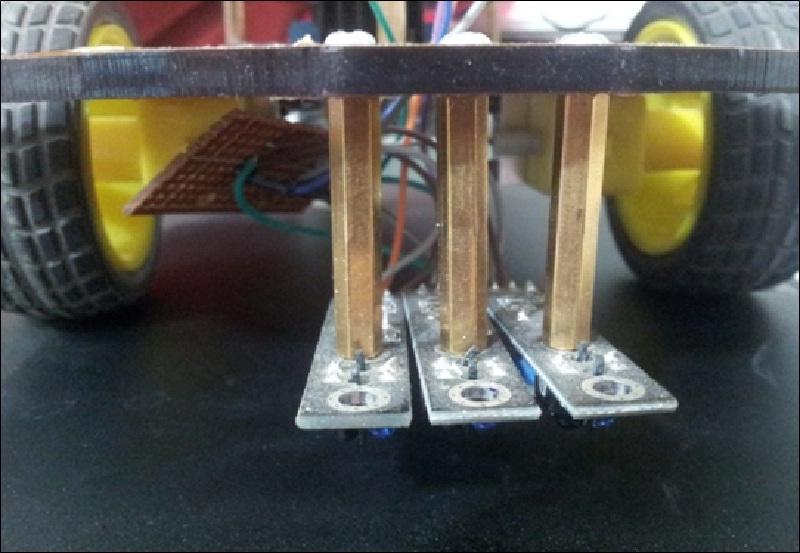
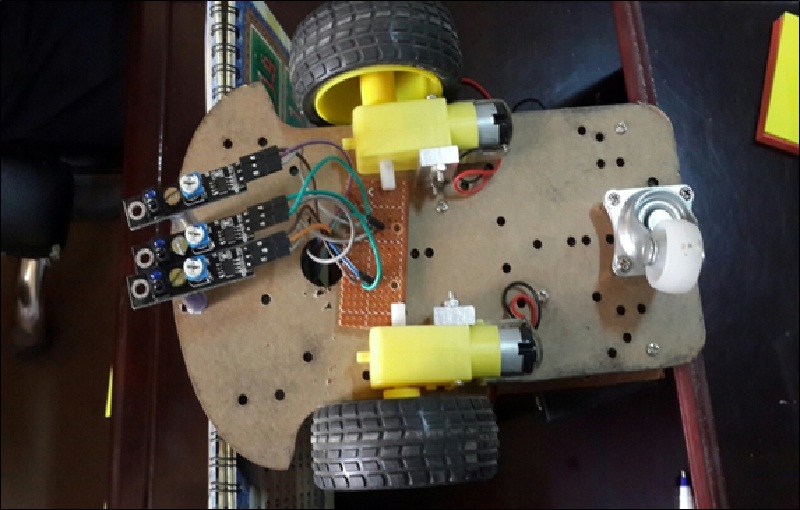
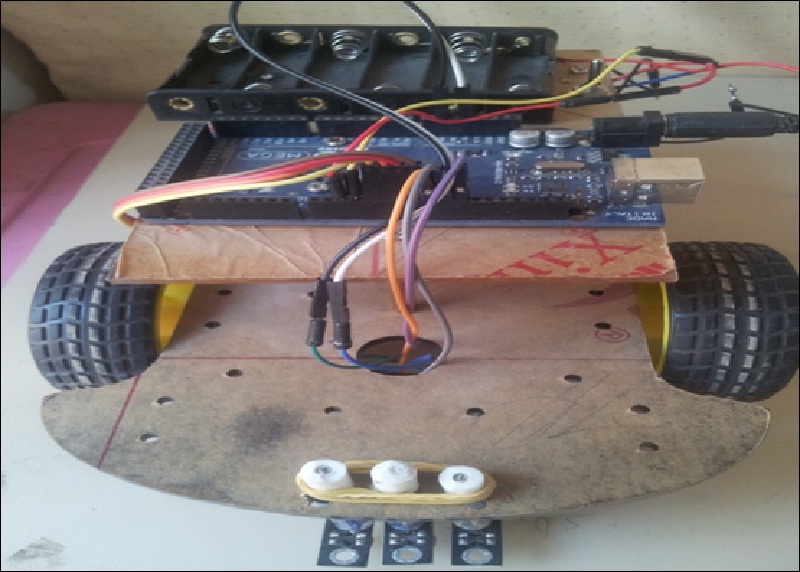
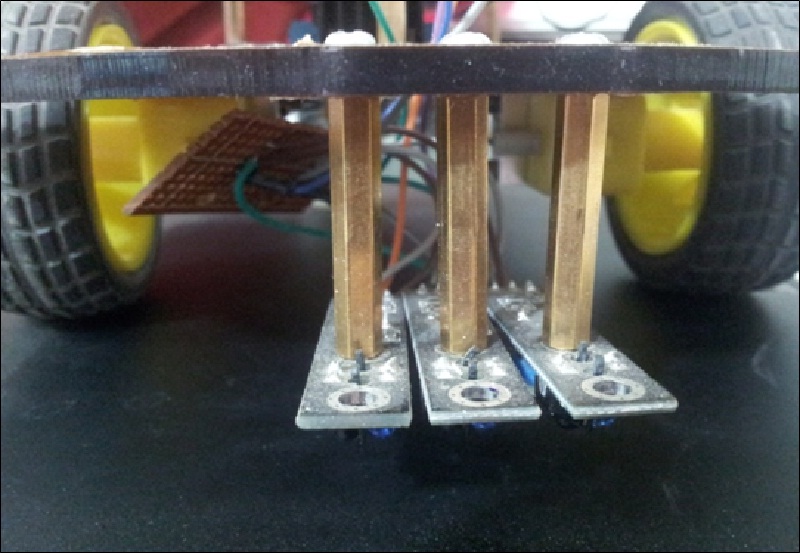
تم تصميم وتنفيذ معمارية حديثة للسيطرة على انسان الي (روبوت) جوال للسير وفق خط مميز (اسود بخلفية بيضاء او بالعكس). يتكون الروبوت من عجلتين لغرض التوجيه والحركة وعجلة ثالثة لغرض التوازن في قسم الهندسة الالكترونية من قبل الطالبتين بشائر عبدالسلام و شهد محمد بأشراف د. محمد سلمان صالح . يتم تصحيح حركة الروبوت من خلال قرائات مستمرة باستخدام ثلاثة متحسسات لاشعة تحت الحمراء تكون مثبته في مقدمة الروبوت. يتم التوجيه من خلال مقارنة القراءات للمتحسسات الثلاثة فيما بينها لغرض تحديد موقع الروبوت نسبة الى المسار المحدد. يتم تصحيح وتغيير اتجاه حركة الروبوت من خلال التحكم بسرعة العجلتين الاماميتين حسب ما مطلوب. يمكن استخدام مثل هكذا روبوت لاستخدامات خاصة لغرض التجوال بين محطات محددة يكلف بها الروبوت لأداء عمل معين. تم تنفيذ المشروع واجريت الفحوصات على عملة وكانت النتائج مشجعة وناجحة للغاية.